Decoders.
 Bij het digitaliseren van een baan heb je voor de locomotieven en de besturing van de wissels, seinen en overwegen decoders nodig.
Bij het digitaliseren van een baan heb je voor de locomotieven en de besturing van de wissels, seinen en overwegen decoders nodig.
Gezien ik gebruik maak van een multiprotocol centrale kunnen er verschillende soorten decoders gebruikt worden.
Bij het gebruik voor seinen en wissels worden zowel DCC als Motorola decoders gebruikt.
Voor het rollende materieel heb ik gekozen voor hoofdzakelijk ESU decoders vanwege de betrouwbaarheid en beschikbare functies.
Hoewel er van ESU ook decoders verkrijgbaar zijn die meerdere protocollen ondersteunen, is hier gekozen voor decoders die aleen heet DCC protocol ondersteunen.
Met uitzondering van de geluidsdecoders van ESU, die ondersteunen namelijk standaard meerdere protocollen.
(geldt niet voor de "Select" serie, die is voor de Amerikaanse en Canadese markt en kent ook alleen maar DCC)
Locdecoders.
Al het rollend materieel dat een decoder nodig heeft is (of wordt) uitgerust met een DCC decoder.
De meeste locomotieven hebben een ESU decoder aan boord. Er zijn echter een paar uitzonderingen.
Zo komen er ook locs voor met een Lenz (LE135 en silver), Uhlenbrock of Rautenhaus decoder.
De locs die zijn uitgerust met een Lenz decoder, waren bij de aankoop al voorzien van deze decoder.
Zolang deze nog voldoen zullen ze niet vervangen worden.
Indien er een decoder door mijzelf wordt ingebouwd, is deze over algemeen van ESU. Voorheen was dit de Lopi3, sinds 2012 (toen de oude voorraad bij mij op was) de Lopi4.
Er zijn echter een paar uitzonderingen.
In een paar lok's is een Rautenhaus decoder gebruikt i.v.m. de beperkte inbouw ruimte.
Één van de lok's betreft een Köf III rangeer lokje van Roco, ofwel de BR333.

Het betreft hier een oud model waarbij nagenoeg het gehele binnenwerk onder de motor kap van metaal is en geen ruimte biedt aan een decoder.
In de cabine was echter nog wel beperkt ruimte beschikbaar. De toegepaste Rautenhaus RMX991C is klein van afmeting (13,2 x 6,8 x 1,4 mm) en kan voldoende stroom leveren.
Bovendien is de decoder vlak aan een zijde en kan makkelijk 'weggewerkt' worden.
Bij de inbouw is er zelfs nog in de cabine een machinist en verlichting met een warm witte LED aangebracht waarbij de LED stroom erg laag is gehouden (ca 4mA).
Het grootste probleem was het wegwerken van de bedrading, maar is uiteindelijk ook gelukt.
Naast deze locdecoders zijn er enkele uitgerust met een sound decoder, soms van fabriekswege, en soms zelf ingebouwd.
Ook deze decoders zijn van ESU, maar er zijn er 2 die een Uhlenbrock sound decoder aan boord hebben.
Één daarvan is de BR45 van Liliput, een lange stoomlocomotief bestemd voor het zware goederen verkeer.
Programmering locdecoders.
 Zoals al reeds vermeld zijn op een enkeling na alle locomotieven voorzien van een ESU decoder.
Zoals al reeds vermeld zijn op een enkeling na alle locomotieven voorzien van een ESU decoder.
Om het programmeren zo makkelijk mogelijk te houden, is er ook een ESU programmer gekocht.
Niet alleen het programmeren wordt hierdoor een stuk eenvoudiger, maar je kun gelijktijdig een complete database aan leggen van alle instelling voor een bepaalde lok of treinstel.
Indien dan een decoder een keer vervangen zou moeten worden of wil je weer terug naar de door jou gemaakte instellingen, is het herprogrammeren zo gebeurd.
Daarnaast kun je eenvoudig de decoder updaten naar de nieuwste versie of zelf de geluiden in de locsound decoders van ESU programmeren.
Ook decoders van andere merken zijn te programmeren, alleen heb je niet alle programmeer faciliteiten beschikbaar zoals bij ESU decoders.
Wordt misschien eens tijd dat fabrikanten daar ook afspraken over maken, zou het programmeren voor de hobbyist een stuk makkelijker maken.
In de keuze rubriek instellen lok decoders en ijken van locomotieven onder koploper vindt je meer informatie over het programmeren van lok decoders.
Wissel decoders.
 Om wissels en seinen digitaal aan te sturen zijn ook decoders nodig.
Om wissels en seinen digitaal aan te sturen zijn ook decoders nodig.
Op het schaduw station worden de wissels aangedreven door 'ouderwetse' mageneet spoelen.
Hiervoor zijn Viessmann 5211 decoders gebruikt en werken op het Motorola protocol. De 5211 heeft de mogelijkheid om voor de wisselspoelen een aparte voedingsspanning aan te sluiten, de zogenaamde E aansluiting.
Deze voedingsspanning wordt uit een aparte trafo en een gelijkrichter gevoed en heeft als voordeel dat de booster hiermee niet belast wordt.
Omdat er straks ook de nodige seinen moeten worden aangesloten blijft het booster vermogen beschikbaar voor de seinen.
Een nadeel van deze decoder vindt ik de aansluiting van de draden naar de wissel spoelen, voedingsspanning en het digitale signaal.
Deze is uitgevoerd met kleine contactbusjes.
De meegeleverde stekkertjes raken snel los uit de aansluit busjes en kunnen dus makkelijk storing veroorzaken.
Om dit probleem te voorkomen heb ik de draden niet via stekkertjes aangesloten, maar heb ik de draden direct op de aansluit bus gesoldeerd. Hierdoor kunnen de draden niet los raken.
Nadeel is dan wel dat de draden eerst los gesoldeerd moeten worden indien de module moet worden vervangen of dat er iets aangepast moet worden.
 Voor de hoofdbaan waarbij de wissels in het zicht liggen is gebruik gemaakt van servo aandrijving.
Voor de hoofdbaan waarbij de wissels in het zicht liggen is gebruik gemaakt van servo aandrijving.
Buiten het feit dat dit mooier en natuurlijker beweegt, scheelt het ook nog flink in de kosten.
Een standaard magneetspoel aandrijving kost al snel rond de € 20,00.
Een goede servo heb je al voor rond de € 6,00 .
Voor beide soort aandrijvingen is een decoder nodig geschikt voor de bewuste aandrijvingen.
Omgerekend ligt dit per aandrijving zo rond de € 8,00.
Met het gebruik van servo's ligt de prijs per wissel dan zo rond de € 14,00.
Indien er magneetspoelen worden gebruik liggen de kosten rond de € 28,00. per wissel.
Dit is dus 2x zo duur. Niet erg als het gaat om een paar aandrijvingen, maar als je ruim 70 aandrijving voor de wissels moet plaatsen ligt de zaak even wat anders.
Indien we alleen de wissel rekenen die in het zicht liggen praten we al over een besparing van bijna € 250,00.
Kun weer iets anders leuks voor kopen toch.......
Voor de aandrijving van de servo's is de servo decoder DSRD-C van Etecmo gebruikt en werken op het DCC protocol.
Deze decoder heeft niet alleen twee aansluitingen voor servo's maar heeft ook voor elke servo een relais waarmee het hartstuk van de wissel gepolariseerd kan worden.
Indien de servo juist is afgesteld, schakelt dit relais in de middenstand van de tongen om.
Elk relais heeft twee gescheiden contacten. Een gebruik ik voor de polarisatie van het hartstuk, de andere kan voor andere doeleinden gebruikt worden zoals terug melding of aansturen van een sein of indicatie LED.
De servo decoders die op dit moment geplaatst zijn hebben geen aparte aansluiting voor een externe voedingsspanning (DSRS-C model) en worden binnenkort (door Etecmo) aangepast naar een DSRS-S type, waarbij wel gebruik gemaakt kan worden van een externe voedingsspanning.
Het voordeel van de aanpassing is dat de relais niet meer spanningsloos worden bij een eventuele kortsluiting op de baan.
Hoewel dit duidelijk in de handleiding van de decoder is beschreven, heb ik mij niet gerealiseerd, dat dit in de praktijk tot problemen kan leiden.
Bij het spanningsloos raken van de relais kun je namelijk het nadeel hebben dat het hartstuk van een wissel niet goed meer gepolariseerd is.
Indien er op dat moment een lok of wagon op staat zal bij het opheffen van de sluiting opnieuw sluiting op treden.
Een ander groot voordeel van deze decoder vindt ik dat de programmering uiterst simpel is. De basis instelling heb ik bij wissels nergens hoeven wijzigen.
De omloopsnelheid (snelheid van de servo) en uitslag (tong beweging) van de wissels was goed. Alleen het wijzigen van het adres bleek voldoende.
Door een jumper te plaatsen is het alleen nodig om naar het gewenste wisselnummer een commando te sturen. Vervolgens kan de jumper weer worden verwijderen, en de decoder is geprogrammeerd met het juiste adres.
Overigens zijn servo's niet alleen handig voor het bedienen van wissels of armseinen, maar heb ik ook servo's gebruikt voor het draaien van camera's op het schaduw station. Deze worden ook met deze servodecoders aangestuurd.
Dit was de enige servo waarbij ik de snelheid en uitslag via de programmering heb moeten aanpassen.
Opbouw servo aandrijving.
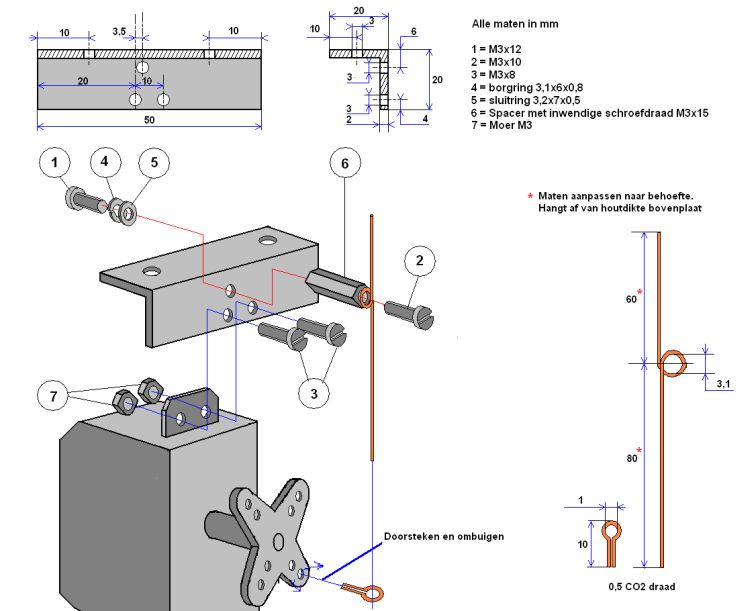 De aandrijving van de servo is vrij simpel van opbouw. De tekening hiernaast toont de constructie zoals deze is gebruikt bij het plaatsen van de servo's.
De aandrijving van de servo is vrij simpel van opbouw. De tekening hiernaast toont de constructie zoals deze is gebruikt bij het plaatsen van de servo's.
De complete beschrijving en deze tekening komt overigens van de website van Etecmo. (met toestemming geplaatst)
De mechanische constructie voor een servo kan simpel en eenvoudig zelf worden gemaakt.
Voor de beugel gebruiken we een stukje aluminium hoek profiel van 20x20 mm, en is een standaard maat die in de bouwmarkt of doe-het-zelf handel goed te verkrijgen is.
Hiervan wordt een lengte af gezaagd van 50mm.
De volgende stap is het boren van de montage gaten voor in de bovenplaat.
De maten voor deze gaten wordt aangegeven op de tekening en mogen naar behoeft worden aangepast.
De gebruikt servo motor (type RS-2 van Modelcraft) had aan de voorzijde van de montage plaat een kleine nok zitten die met en scherp mes eenvoudig kan worden weggesneden.
Dit is nodig omdat de servo met de bevestigingsplaat vlak op de aluminium hoeklijn moet worden gemonteerd.
Vervolgens kunnen de overige 3 gaten worden geboord zoals die worden aangegeven op de tekening.
Indien dit is gebeurd kan de servo worden gemonteerd op de aluminium hoeklijn en kan de spacer (no 6 op de tekening) worden geplaatst.
De spacer is niets anders dan een 6 kantige afstandhouder met inwendig doorlopende M3 schroefdraad. Deze zijn makkelijk te verkrijgen bij de (internet) elektronicawinkel en wordt meestal gebruikt als afstand montage bus voor printplaten. Een ronde uitvoering is natuurlijk net zo bruikbaar als deze in het voorbeeld.
De aandrijfstang, die later in de wissel geplaatst wordt, is gemaakt van Co2 lasdraad. Het voordeel van deze draad is dat hij veerkrachtig en stevig is.
Dit draad is eveneens makkelijk verkrijgbaar en is in diverse diameters verkrijgbaar en wordt op een rol geleverd. Er is gekozen voor 0,5 mm Co2 draad omdat deze goed past in het gaatje van de beweegbare wisselstang, makkelijk te buigen is, maar is ook stevig en veerkrachtig.
Als het draad van de rol wordt gehaald, zul je merken dat deze spiraalvormig is. Door deze aan n zijde in de bankschroef te klemmen en de andere zijde in de kop van een boormachine te bevestigen, kan de draad recht gemaakt worden door de boorkop even te laten draaien. 50 tot 100 slagen is over het algemeen voldoende.
De draad is nu mooi recht geworden en kan vervolgens worden gebogen volgens tekening.
Om het oog in de draad op een juiste diameter te buigen, kan er gebruik gemaakt worden van een spiraalboor van 3,1mm.
Door deze in een bankschroef te klemmen kan het oog gebogen worden door deze om het boortje heen te buigen.
Belangrijk is dat er niet al te veel spelling ontstaat tussen dit oog en het M3 boutje waarmee later de draad moet worden vastgezet.
Ook het oog dat later in de hevel geplaatst moet worden kan op dezelfde manier van deze draad gebogen worden.
Hierbij maken we echter gebruik van een spiraal boortje van ca 1mm.
Vervolgens plaatsen we dit oog in de hevel die op de servo moet worden bevestigd en kunnen de uiteinde worden omgebogen.
De aandrijfstang kan nu worden geplaatst en met een M3 boutje (no 2 in de tekening) worden vastgezet zoals is aangegeven in de tekening.
Voordat de hevel definitief op de servo kan worden geplaatst, moet eerst de zaak mechanisch afgesteld worden.
De meeste servo's kun je met de hand verdraaien, indien de hevel (of schijf) is geplaatst.
Men dient er nu voor te zorgen dat de servo mechanisch in de middenstand staat, voordat de hevel definitief op de servo wordt geplaatst.
Dit kan door eerst de hevel los op de servo te plaatsen en deze voorzichtig te draaien, totdat de servo in het midden staat.
Indien de hevel nu op de servo wordt geplaatst, moet de aandrijfstang en recht omhoog steken en in het verlengd van de hevel staan.
Mogelijk dat door de vertanding die op de as van de servo zit dit niet voor 100% haalbaar is. Kies dan de meest gunstige stand.
Als dit het geval is kan de hevel definitief worden vast gezet.
De aandrijving is nu in principe klaar om onder een wissel geplaatst te worden.
Het enige wat na het plaatsen nog dient te gebeuren is het elektronisch afstellen van de snelheid en uitslag van de servo.
 Indien dan ook de zaak elektronisch is afgesteld rest alleen nog dat de overtollige draadlengte die door de beweegbare wisselstang steekt af te knippen.
Indien dan ook de zaak elektronisch is afgesteld rest alleen nog dat de overtollige draadlengte die door de beweegbare wisselstang steekt af te knippen.
Aanpassing voor wissel in nieuwe museum lijn
De servo die dient voor het aansturen van de wissel die is toegepast in de nieuwe gebouwde museum lijn, kon niet volgens bovenstaande methode worden geplaatst.
De servo is hier anders gemonteerd waardoor er een ander soort aandrijving is ontstaan zoals hierboven is beschreven.
Hierbij moest de servo naast de baan worden geplaatst, omdat onder de desbetreffende wissel een spoor loopt en de doorrij hoogte beperkt is.
Omdat de slag die de servo hier moet maken, kleiner is dan bij de "standaard" servo aansturing (30 graden i.p.v. 90 graden), is ook de instelling van de decoder gewijzigd.
Vanwege de klein slag is ook de snelheid hierbij aangepast om de tongen toch langzaam te laten bewegen.
Sein decoders.
 Het aansturen van de seinen gebeurd op dit moment nog niet.
Het aansturen van de seinen gebeurd op dit moment nog niet.
Wel zijn er een aantal seindecoders beschikbaar om de seinen aan te sturen.
Er zijn een aantal Viessmann schakeldecoder 5213 voorhanden die hiervoor gebruikt kunnen worden.
In het besturingsprogramma Koploper zijn deze wel alvast gedefinieerd, maar nog niet daadwerkelijk aangesloten.
Dit betekend dat het op het beeldscherm al wel werkt, maar er worden op de baan nog geen seinen aangestuurd.
Wel zijn er al op bepaalde plaatsen seinen geplaatst, maar werken op dit moment nog niet.
Keuze rail materiaal
 Na de grove schetsen van het banenplan moest er een keuze gemaakt worden voor het railmateriaal. Een van de belangrijkste afweging was het beschikbare ......
Na de grove schetsen van het banenplan moest er een keuze gemaakt worden voor het railmateriaal. Een van de belangrijkste afweging was het beschikbare ......
Digitale techniek
 Door het enorme aanbod van verschillende digitale systemen, is het niet eenvoudig om een keuze te maken. Wel stond vast dat het DCC protocol ondersteund moest worden.......
Door het enorme aanbod van verschillende digitale systemen, is het niet eenvoudig om een keuze te maken. Wel stond vast dat het DCC protocol ondersteund moest worden.......
Besturing
 Er zijn verschillende software pakketen die een geautomatiseerde treinloop mogelijk maken. Sommige zijn zeer beperkt, de andere heeft zeer uitgebreide mogelijkeheden .....
Er zijn verschillende software pakketen die een geautomatiseerde treinloop mogelijk maken. Sommige zijn zeer beperkt, de andere heeft zeer uitgebreide mogelijkeheden .....
